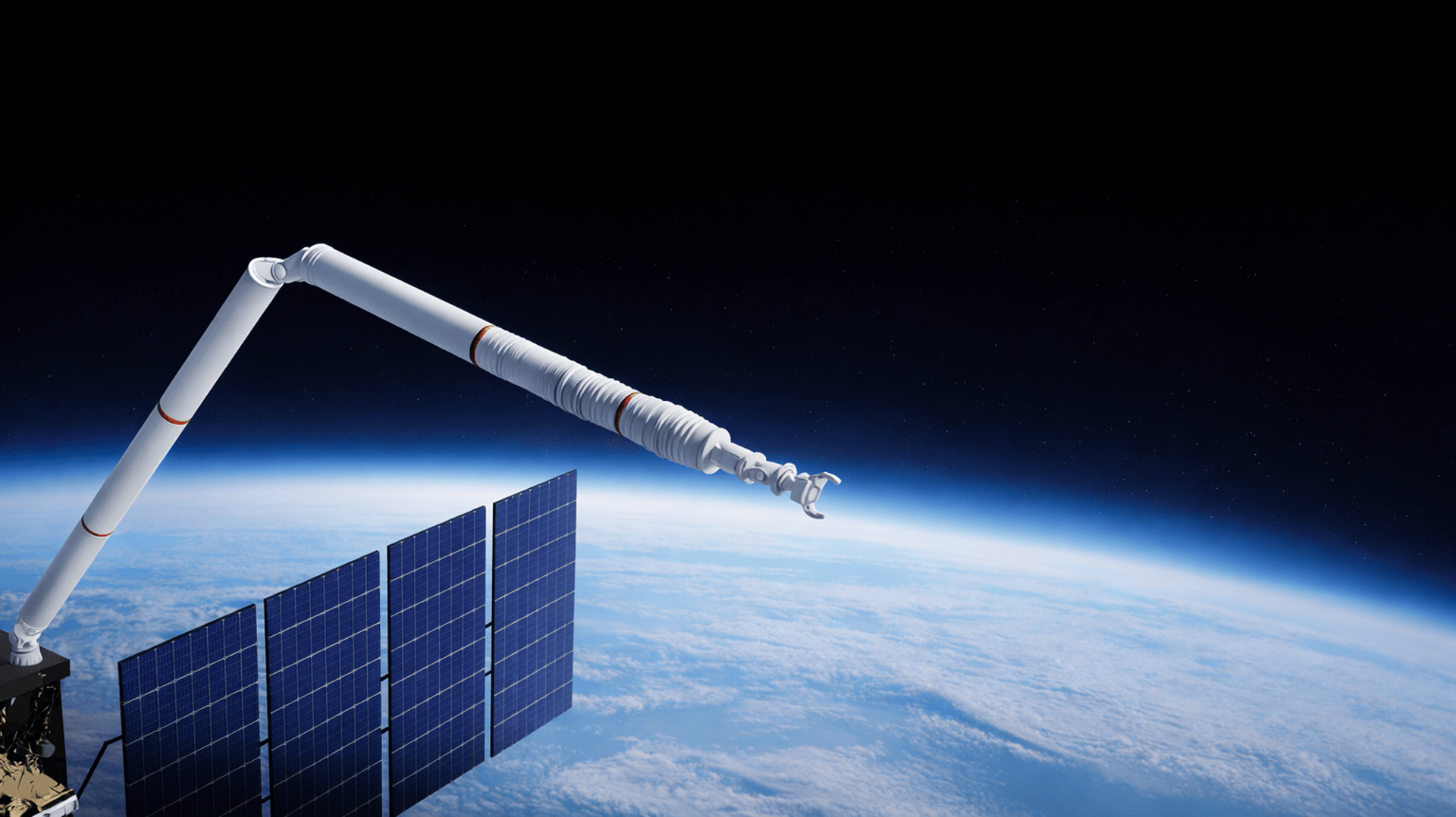
Inflatable robotic arms
for space.
Launch small, deploy big.
IDRA — Inflatable & Deployable Robotic Arm
A modular robotic manipulator combining inflatable links with electrically actuated joints. Extreme compactness when stowed — large workspace when deployed.
An integrated, mission-ready system
Deplotic delivers hardware and software as a single offering — a modular robotic platform with advanced perception, control, and digital twin capabilities.
The technology behind IDRA
IDRA combines advanced inflatable modules, a patented modular architecture, and autonomous control into a single mission-ready system.
IDRA's links are inflatable structures wound with Kevlar aramid fibers — delivering the structural stiffness, vibration damping, and thermal stability that space robotics demands. The multi-layer architecture achieves near-zero coefficient of thermal expansion, ensuring predictable kinematics across the extreme temperature cycles of orbit.
IDRA pairs inflatable structural links with precision electric motor joints — links, joints, and end-effectors selected and configured for each specific mission. The result is a scalable platform: from compact small satellite applications to larger orbital infrastructure, the same core technology adapts to different reach, payload, and interface requirements.
IDRA integrates vision-based control systems capable of autonomously identifying, tracking, and approaching a target. The Digital Twin runs pre-mission simulations and mirrors operations in real time — reducing risk before any manoeuvre is executed in orbit.
Advancing in-orbit servicing
Big workspace, strong software, new possibilities. After docking, IDRA reaches any part of the target — enabling operations that were previously out of reach.
- Reach any part of a docked target
- Full workspace around the target satellite
- Compatible with non-cooperative targets
- Berthing and satellite reallocation
- Active debris removal
- Compliant, low-impact docking
- Close-range inspection and fault detection
- Self-servicing operations
- Refueling support
Compact when stowed, large when deployed, modular, easy to install — IDRA is designed for environments where space is limited and conditions are extreme. If you have a use case in mind, we want to hear it.
From lab to orbit
TRL 5 completed. IDRA is now advancing through full system integration, autonomous control, and in-orbit demonstration — a clear path from validated prototype to commercial deployment.
Proof of Concept
Analytical and experimental validation · Concept feasibility · First inflatable link prototypes · Robot control in microgravity
Validation in Relevant Environments
Thermal-vacuum tests on inflatable modules · Full prototype validation · ESA BIC Turin incubation · IP Award
IDRA.2 — Modular Architecture & AI Control
Inflatable module optimization · Modular software architecture · AI perception-decision pipeline · Co-validation campaign
IDRA.3 — 7-DOF Prototype & System Demonstration
Full 7-DOF arm assembly · AI-based control algorithms · Testing in representative orbital scenarios · Performance validation
IDRA.4 — Space Qualification & In-Orbit Demo
ECSS-compliant qualification · Industrialisation · In-Orbit Demonstration · Autonomous servicing validation in orbit
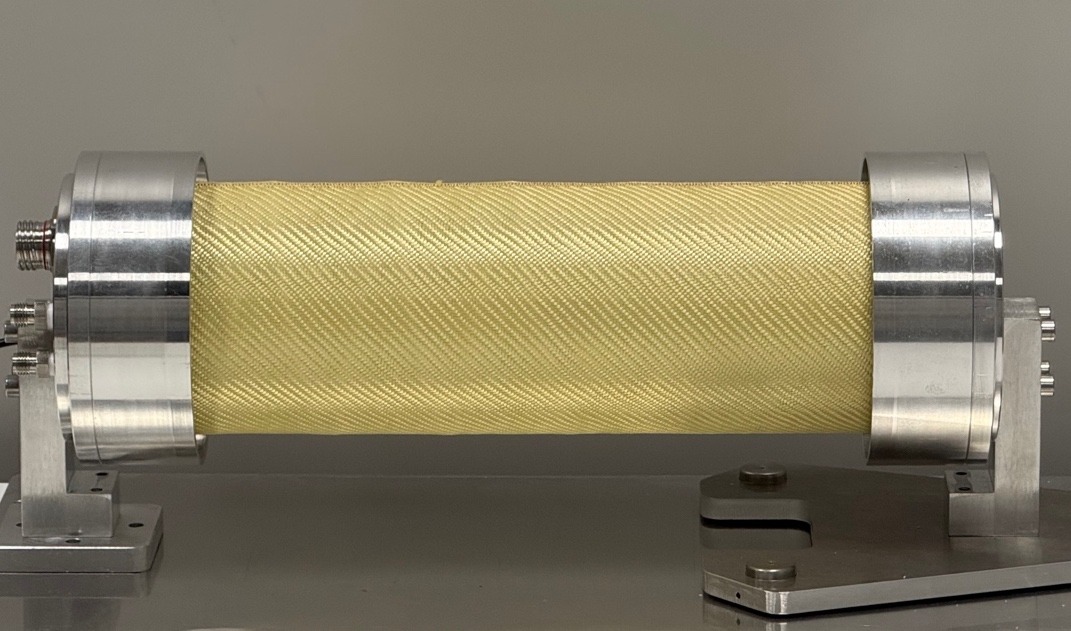
Inflatable structural link — Kevlar-woven, pressure-tested under thermal-vacuum conditions
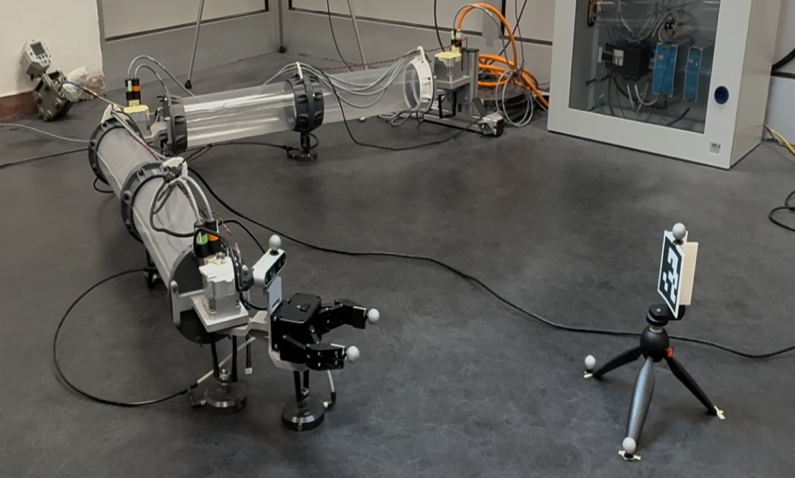
Full-system prototype under ground testing at Politecnico di Torino
Expertise. Innovation. Ambition.
Deplotic was born as a spin-off of Politecnico di Torino from the work of a research team specialised in robotic systems for harsh environments. After years of work in robotics for space, nuclear, and industrial applications, the team transformed its know-how into a company focused on a new generation of deployable robotic systems for space.






Backed by the best



Progetto IDRA finanziato dal Programma NODES – Nord Ovest Digitale E Sostenibile (ECS 00000036), PNRR Missione 4 Componente 2, Investimento 1.5 — Spoke 1 "Aerospace and Sustainable Mobility". Finanziato dal Ministero dell'Università e della Ricerca (MUR), CUP E13B22000020001.
Latest from Deplotic
Let's talk about your mission.
Whether you are a satellite operator, mission integrator, space agency, or investor — we want to hear from you.
Corso Castelfidardo 30/a
10129, Torino (TO), Italy